
Hi! I am Utkarsh Mishra. I started my 3rd year of PhD in Robotics at Georgia Tech with Dr. Yongxin Chen and Dr. Danfei Xu. I am particularly interested in exploring generative methods and robot learning to achieve generalizable and safe autonomy. I have worked with Sony R&D US Labs, Prof. Matthew E. Taylor at the Inverse Reinforcement Learning lab, University of Alberta and Prof. Shishir Kolathaya at the Stochastic Robotics lab, Indian Institute of Science. Previously, I have collaborated with Prof. Auke Ijspeert and Dr. Dimitar Stanev at the Biorobotics Laboratory, EPFL. I have also worked on Cable Driven Robots with Dr. Stéphane Caro at CNRS-LS2N France.
Updates:
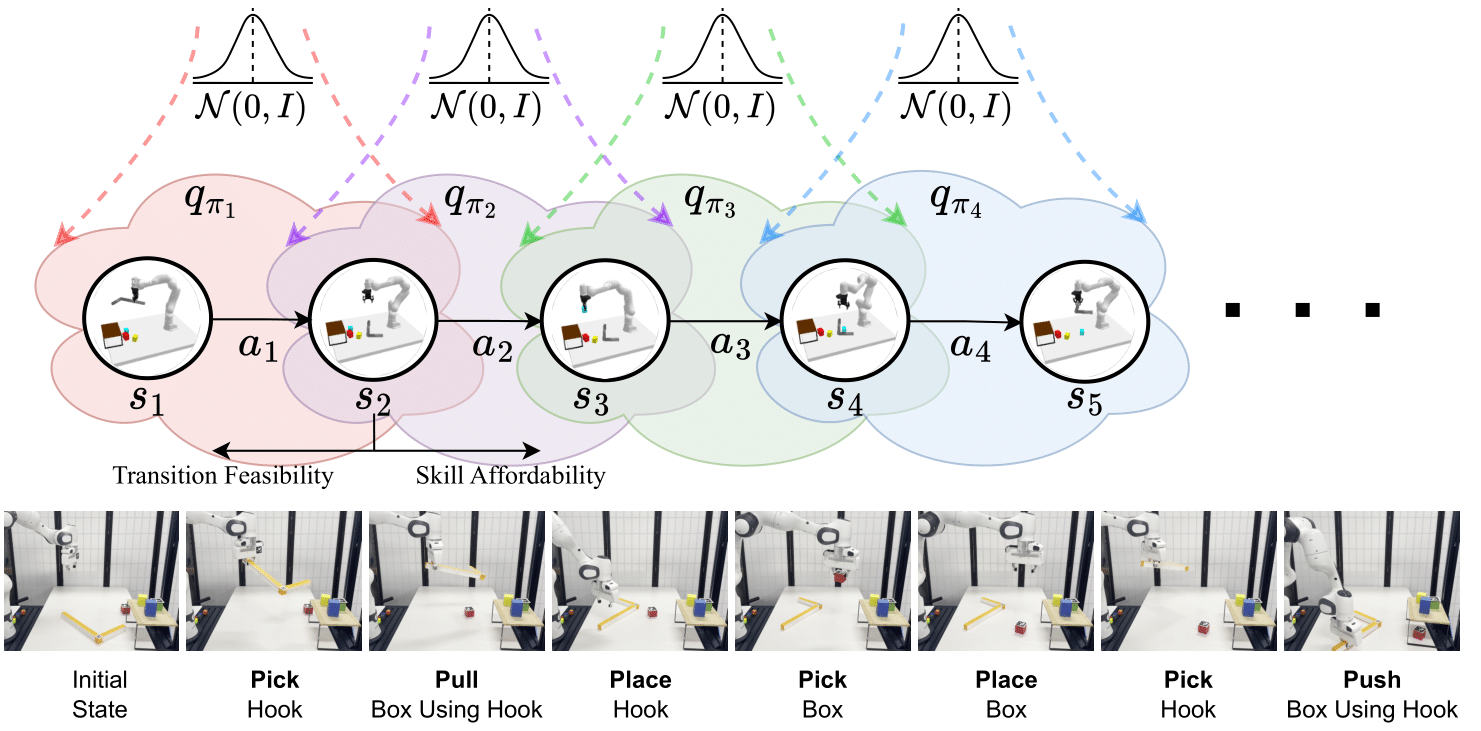
- Generative Factor Chaining is accepted as CoRL24 poster. More details can be found here.
- Generative Factor Chaining will be presented as a SPOTLIGHT talk in Back to the Future ICRA 2024 workshop!
- Excited to spend my 2024 Summer at Toyota Research Institute as a ML/Robotics Research Intern.
- Generative Factor Chaining won best paper award in Back to the Future ICRA 2024 workshop! Thanks to the organizers.
- Generative Factor Chaining will be presented as a SPOTLIGHT talk in Back to the Future ICRA 2024 workshop!
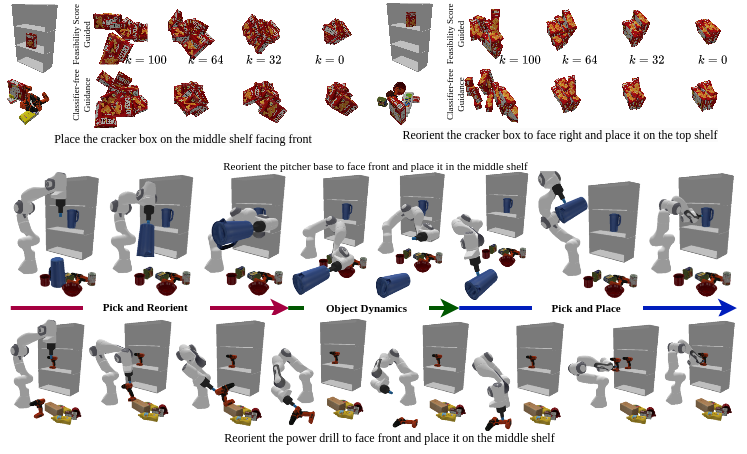
- ReorientDiff is accepted at ICRA 2024. See you in Yokohama! More details here.
- Generative Skill Chaining is out on arxiv after 5 months "on hold": Arxiv: 2401.03360.
- Attending CoRL'23. Gave a (SPOTLIGHT) talk at the LEAP workshop. Also presented posters at LEAP and TGR workshop.
- Generative Skill Chaining is accepted as CoRL23 poster. More details can be found here.

|

|
|

|
| PhD, Robotics Georgia Tech 2022 - Present |
ML/Robotics Research Intern Toyota Research Institute Summer 2024 |
AI/ML Research Intern Sony R&D US Labs Summer 2023 |
BTech, ME IIT Roorkee 2017 - 2021 |
Selected Articles

Oral: ICRA 2024 Workshop — Back to the Future: Robot Learning Going Probabilistic
Oral: ICRA 2024 Workshop: A Future Roadmap for Sensorimotor Skill Learning for Robot Manipulation
Website Paper Code Video
Oral: CoRL 2023 Learning Effective Abstractions for Planning (LEAP) Workshop
Website Paper Code Video
Poster: RSS 2023 Learning for Task and Motion Planning Workshop
Website Paper Code Video
Poster: Reinforcement Learning and Decision Making 2022.
Poster: Ecological RL workshop at NeurIPS 2021.
Website Paper Code Video
Poster: 2nd Offline RL workshop at NeurIPS 2021.
Poster: Deep RL Workshop at NeurIPS 2021.
Website Paper Code Video
Special Issue: IDETC/CIE 2021 M&R Conference.
Website Paper Code Video
