Authors: Utkarsh A. Mishra and Manan Tomar
Description:
This repository is a collection of widely used self-supervised auxiliary losses used for learning representations in reinforcement learning. Learning representations for pixel-based control has gained significant attention recently in reinforcement learning. A wide range of methods have been proposed to enable efficient learning. Such methods can be broadly classsified into few categories based on the auxiliary loss used, namely, with State metric (DBC), Reconstruction (DREAMER, TIA), Contrastive (CURL) and Non-Contrastives (SPR) losses.
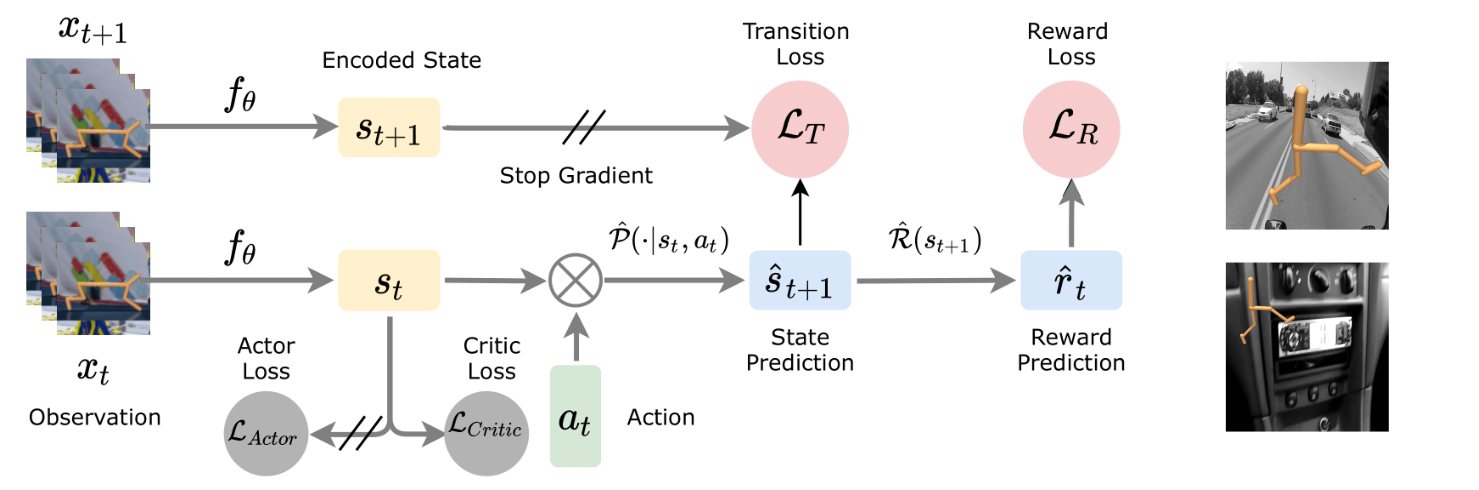
The approach in the repository uses a baseline architecture as shown in figure above (left) which is a very simple arrangement of reward and transition prediction modules in addition to the SAC Actor-Critic losses. There are 8 different experiments performed on a particular type of environment data named as the following cases:
- Case 0: Baseline only SAC, no reward and transition losses
- Case 1: Baseline, Reward through Transition
- Case 2: Baseline with only Transition loss
- Case 3: Baseline with only Reward loss
- Case 4: Baseline, Independent Reward and Transition
- Case 5: Baseline + Value Aware loss
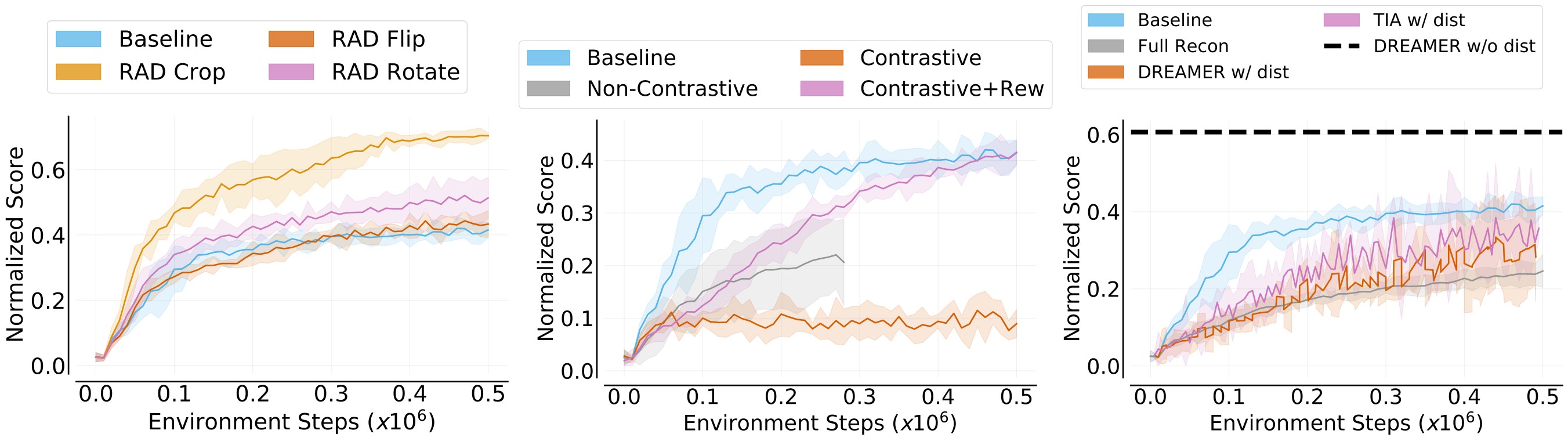
- Case 6: Baseline + Reconstruction loss (based on DREAMER)
- Case 7: Baseline + Contrastive loss (based on CURL)
- Case 8: Baseline + Non-Contrastive loss (similar to SPR which does this for Atari)
All the above experiments were further performed on 4 different environment data:
- Type 1: Simple Pixel DM-Control
- Type 2: Pixel DM-Control with Natural Driving Distrators (Figure above - right-top)
- Type 3: Pixel DM-Control + Natural Driving Distrators + Camera position and zoom offsets (Figure above - right-bottom)
- Type 4: Augmented Pixel DM-Control + Natural Driving Distrators
Usage:
In order to use the repository, please install the requirements with Python 3.6.
python3 -m pip install -r requirements.txt
Running the Cases
An example of a base script is already provided in scripts/run.sh where the order of arguments are case number, horizon length, domain and task of DM-Control suite. The complete script for cheetah-run (from DMC), case-number (from 0 to 8 as above) and horizon 1 is as follows:
CUDA_VISIBLE_DEVICES=0 python train.py \
--domain_name cheetah \
--task_name run --case 1 \
--encoder_type pixel --work_dir ./tmp/test \
--action_repeat 4 --num_eval_episodes 10 \
--pre_transform_image_size 100 --image_size 84 --replay_buffer_capacity 100 \
--frame_stack 3 --seed 1 --critic_lr 1e-3 --actor_lr 1e-3 --eval_freq 10000 \
--batch_size 16 --num_train_steps 160000 \
--init_steps 1000 --horizon 1
Running the natural video setting
You can download the Kinetics 400 dataset and grab the driving_car label from the train dataset to replicate our setup. Some instructions for downloading the dataset can be found here: https://github.com/Showmax/kinetics-downloader. Here, one downloaded video is provided in './distractors/driving/ folder. The following flag can be used to incorporate the distractor settings:
--resource_files './distractors/driving/*.mp4' --img_source 'video' --total_frames 50
For more information, refer DBC codebase.
Offsets in Camera position and Zoom
The offset data can be activated by using the --off_center flag when the DM-Control suite is changed from ./local_dm_control_suite/ to ./local_dm_control_suite_off_center/. The observations for each of the modified environment can be found in the ./local_dm_control_suite_off_center/{env}.xml file under the <camera name="cam0"> tag.
Data Augmentations
Augmentations can be specified through the --data_augs flag. This codebase supports the augmentations specified in data_augs.py and taken from RAD codebase. To chain multiple data augmentation simply separate the augmentation strings with a - string. For example to apply crop -> rotate -> flip you can do the following --data_augs crop-rotate-flip.
Logging
To save the trained model, the tensorboard logs, video of evaluation episodes and the replay buffer, the following flags can be used respectively:
--save_model \
--save_tb \
--save_video \
--save_buffer \
Citation:
If you find this useful you can cite this work as follows:
@misc{representation-learning-pixels,
author = {Mishra, Utkarsh A. and Tomar, Manan},
title = {Learning Representations in Reinforcement Learning on Pixel-Based Observations with Distractors},
year = {2021},
publisher = {GitHub},
journal = {GitHub repository},
url = {https://github.com/UtkarshMishra04/pixel-representations-RL}
}
@article{tomar2021learning,
title={Learning Representations for Pixel-based Control: What Matters and Why?},
author={Tomar, Manan and Mishra, Utkarsh A and Zhang, Amy and Taylor, Matthew E},
journal={arXiv preprint arXiv:2111.07775},
year={2021}
}
Acknowledgement:
We thank the authors of RAD, CURL and SPR for their well-structured open source code.